简单有效
CANoe
jstl
产品经理
产品管理
亚马逊
collections
self-attention
测试工具
SpringMVC的常见注解
pb协议
汇编语言
paas
cannonjs
函数替换
android教程
logback
建造者模式
语音读写播放
命令链接按钮
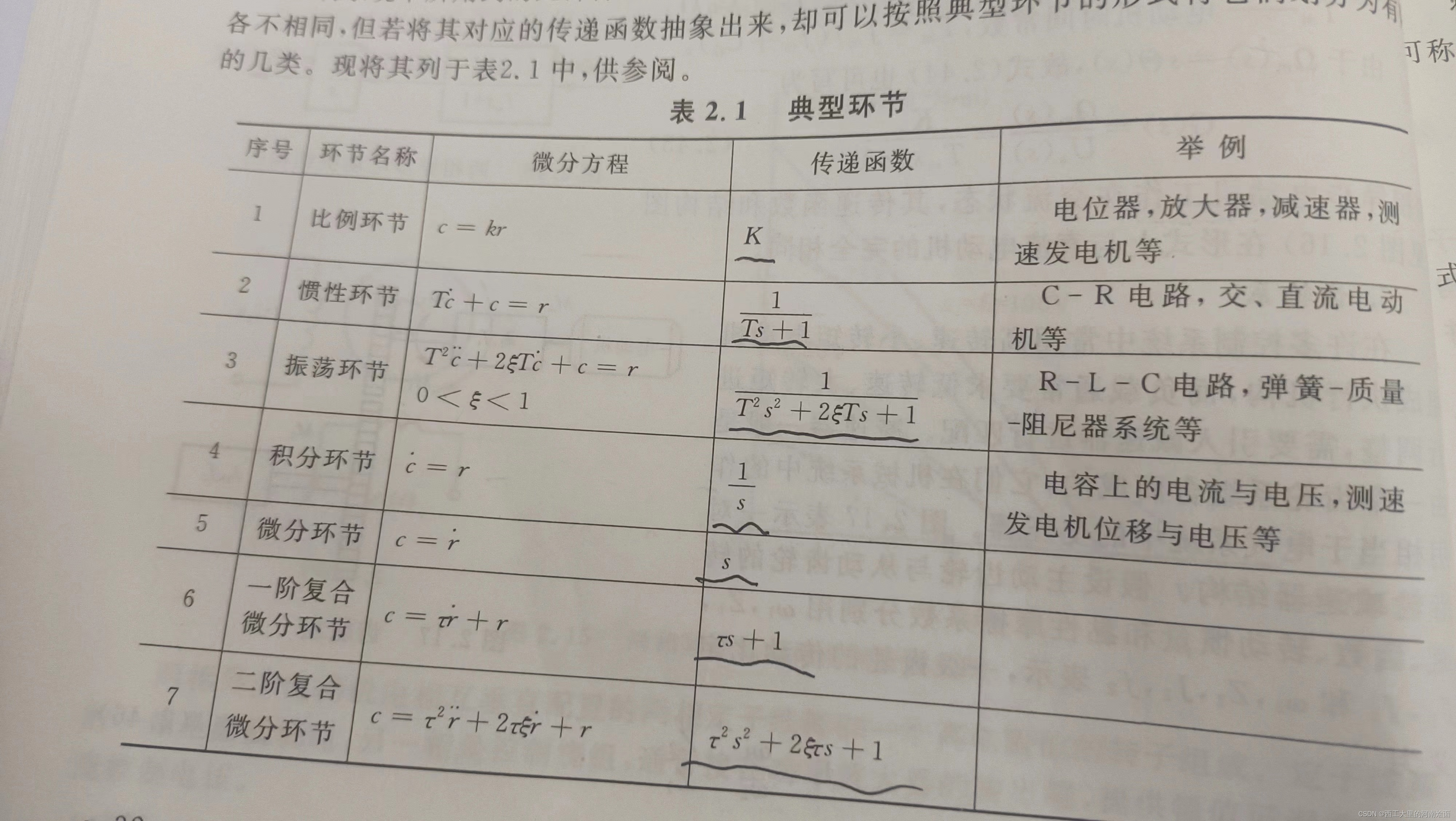
自动控制
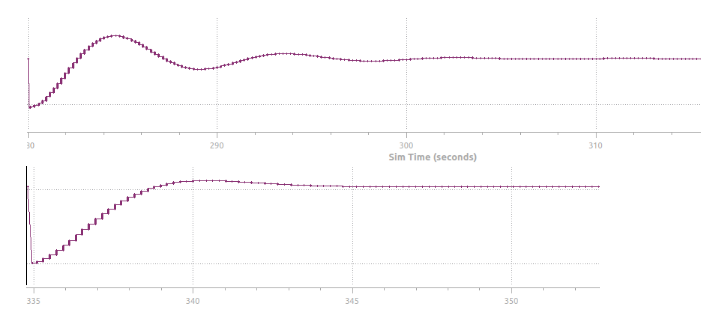
2024/4/11 15:01:48增益自适应PI控制器+死区过滤器(Smart PLC向导PID编程应用)
增益自适应和死区过滤器如果不和S7-200 SMART PLC PID向导组合实现,大家可以自行编写优化的PID指令。算法起始非常简单,具体实现过程大家可以参看下面的文章链接,
三菱增量式PID+死区过滤器
三菱PLC增量式PID算法FB(带死区设置和外部复位控制)_RXXW_Dor的博客-CSDN博客关于…
二阶低通滤波器(通用滤波器)
一阶低通滤波器的详细算法介绍请参看下面文章:
一阶RC算法公式和梯形图代码
PLC信号处理系列之一阶低通(RC)滤波器算法_反馈信号低通滤波器_RXXW_Dor的博客-CSDN博客1、先看看RC滤波的优缺点 优点:采用数字滤波算法来实现动态的RC滤波,则能很好的克服模拟滤波器的缺点; 1…
PLC算法系列之单自由度(1DOF)PID(Simulink+SCL详细代码分析)
在学习了解博途PLC的单自由度PID(1DOF)之前,大家需要具备Simulink的基础知识,PID入门的Simulink基础知识,请参看下面的文章链接:
PID控制入门之PID仿真(Simulink)_RXXW_Dor的博客-CSDN博客离散传递函数模型,更适合嵌入式系统,PLC系统的实现。2、传递函数大家也可以选择…
多旋翼无人机仿真 rotors_simulator:基于PID控制器的位置控制
多旋翼无人机仿真 rotors_simulator:基于PID控制器的位置控制---航向控制前言航向控制P控制收敛结果收敛过程PD控制收敛结果收敛过程结果总结前言
无人机(Unmanned Aerial Vehicle),指的是一种由动力驱动的、无线遥控或自主飞行、…
自动化控制系统的设计重点是什么?
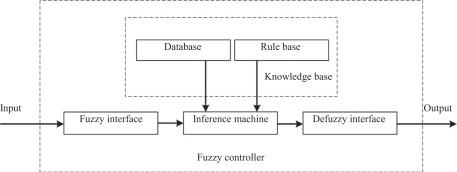
要实现对选择性激光烧结系统预热温度的控制,需要找到合理的控制对象模型,但选择性激光烧结设备的预热温度场是一个复杂的非线性系统,很难找到合理的控制对象模型来实现预热温度场的温度控制。模糊控制不需要具体的控制模型,预热温…
LabVIEW开发气动悬浮系统教学平台
LabVIEW开发气动悬浮系统教学平台
目前,通过使用可编程逻辑控制器,几乎可以实现任何工业生产过程的自动化。工业自动化可以提高流程效率,提高生产水平并减少损失。
在此背景下,介绍了工业自动化教育系统的设计和实现以及气动悬浮…
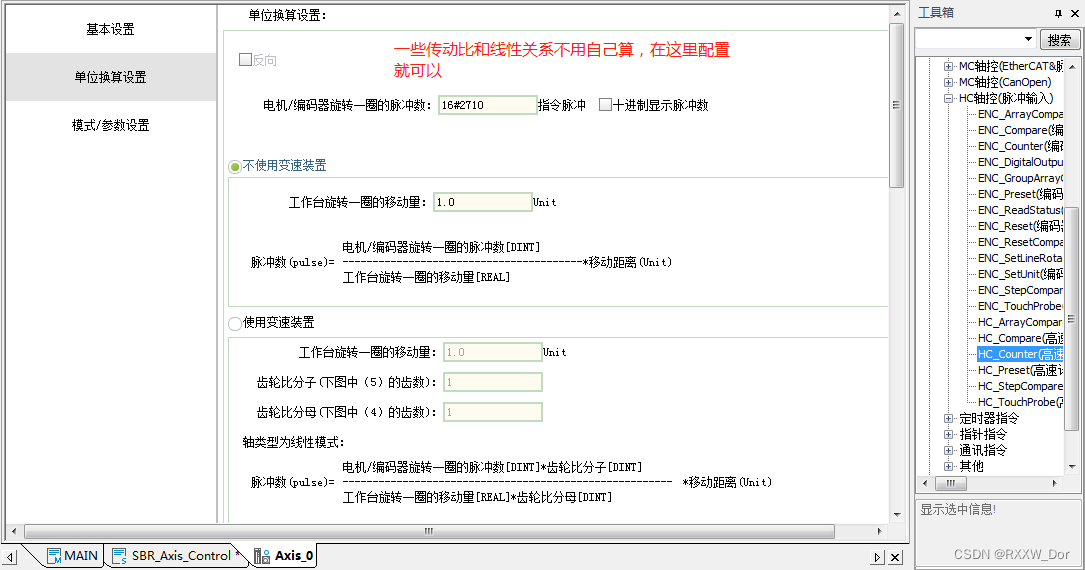
汇川H5U计数器轴编程应用(高速计数和测速应用)
H5U编码器轴和脉冲轴相关应用测试请参看下面文章:
H5U PLC本地脉冲轴和本地编码器轴测试_RXXW_Dor的博客-CSDN博客H5U PLC如何通过EtherCAT总线控制伺服运动,请参看下面的博客汇川H5U PLC通过EtherCAT总线控制SV660N和X3E伺服_RXXW_Dor的博客-CSDN博客。https://blog.csdn.n…
Smith预估控制器
Smith预估器主要针对存在大滞后的系统,作用延迟和反馈延迟环节的控制,Smith预估器的另一篇文章,请参看下面的博客文章: 博途1200/1500PLC Smith预估器(补偿器)算法实现(FB)_RXXW_Dor的博客-CSDN博客在写这篇文章之前写过一篇"大林控制算法",大家可以参看下面这篇…
自动控制原理备考-1题-传递函数
首先致敬西北工业大学自动控制原理的无冕之王张科老师。
期末考试,先下手为强,后下手遭殃。今天我们就开始一起针对期末考试有关题型一一梳理,突破解决。
给你一个系统结构图,让你求R(s)和N(s)同时作用下的C(s)。基本…
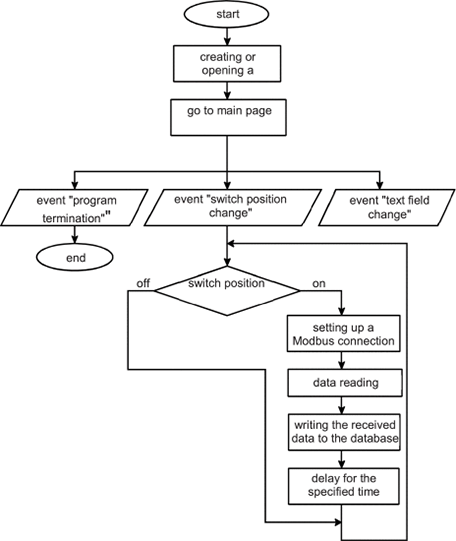
LabVIEW使用ModbusTCP协议构建分布式测量系统
LabVIEW使用ModbusTCP协议构建分布式测量系统
分布式测量系统主要用于监控远程物体。这种系统允许对系统用户获得的数据进行全面的数据收集、处理、存储和组织访问。它们可能包括许多不同类型的传感器。
在任何具有互联网接入的个人计算机上运行的软件都会发送来自传感器的测…

卡尔曼滤波(Kalman Filter)原理浅析-数学理论推导-2
目录 前言数学理论推导卡尔曼增益超详细数学推导结语参考 前言 最近项目需求涉及到目标跟踪部分,准备从 DeepSORT 多目标跟踪算法入手。DeepSORT 中涉及的内容有点多,以前也就对其进行了简单的了解,但是真正去做发现总是存在这样或者那样的困…

数字温度计电路设计/热带鱼缸水温自动控制器电路设计
数字温度计电路设计
本电路是通过应用 AD590 专用集成温度传感器制成的温度计,具有结构简单、使用可靠、精度高的特点。
一、电路工作原理
电路原理如图 9 所示。 100V的交流电压通过变压器T1、整流桥堆UR和电容器C1后,得到一直流电压,再…
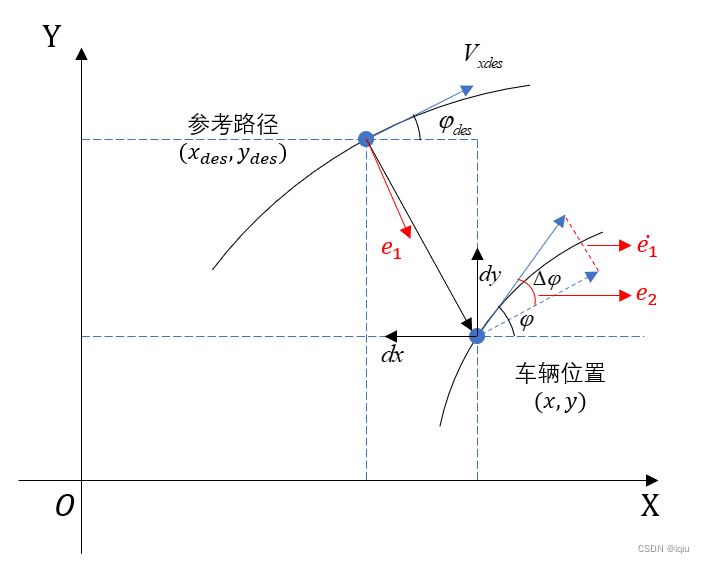
Apollo控制部分3-- 车辆动力学模型详解
Apollo控制部分3-- 车辆动力学模型详解摘要一、预备知识二、轮胎坐标系三、车辆自行车模型公式推导四、参考路径误差模型author:Wutong time:2023-03-17 20:05
摘要
动力学模型分析是整个无人车控制模块的基础,同时也是动力学模型是否准确也…
增量式PID控制具有积分特性的执行器(算法分析+代码)
增量式PID的算法公式详细解读请参看下面的文章链接:
西门子SMART PLC增量式PID(完整梯形图FC)_梯形图实现pid算法_RXXW_Dor的博客-CSDN博客西门子PLC自带的PID指令是基于位置型的PID,位置型PID的算法公式和详细介绍,大家可以参看《PID专栏》的其它文章,这里不再赘述。本篇…
ADRC线性跟踪微分器(ST+SCL语言)
ADRC自抗扰相关算法源代码和公式请参看下面文章链接:
ADRC/Matlab一步步实现跟踪微分器TD(附完整PLC测试代码链接)_ladrc线性跟踪微分器差分方程_RXXW_Dor的博客-CSDN博客关于Adrc的理论分析不是本篇博客的重点,主要也是能力所限,相关理论大家可以看韩京清教授的论文,专栏…
如何提高PID控制器离散化精度(SCL+梯形图代码)
通常采样率(执行频率)1/Ts的典型取值为闭环带宽的5~10倍。实际上大部分工程采样率范围会使我们所期望的闭环性能下降,要忽略采样造成的影响,采样率至少是典型值的10倍。原则上,采样率1/Ts在允许的计算能力范围内越大越好。当采样率较低时,提高PID控制器离散化精度的一种方…
多旋翼无人机仿真 rotors_simulator:基于PID控制器的位置控制---水平位置控制
多旋翼无人机仿真 rotors_simulator:基于PID控制器的位置控制---水平位置控制前言水平位置控制串级P控制收敛结果收敛过程串级PID控制收敛结果收敛过程结果总结前言
无人机(Unmanned Aerial Vehicle),指的是一种由动力驱动的、无…
多段曲线控温从Simulink仿真到PLC控制实现
多段曲线温度控制,专栏有系列文章和完整源代码,大家可以自行搜索。链接如下:
博途PLC 1200/1500PLC多段曲线控温FB(支持40段控温曲线、段曲线搜索、暂停、跳段等功能)_RXXW_Dor的博客-CSDN博客多段控温曲线之前专栏的其它文章也有所讲解,大家可以参看下面这篇专栏博途1200…
常用算法———P I D控制算法(P I D三个参数的作用和两种P I D算法的代码实现)
如果有错误请及时指出,大家一起学习交流。
一、PID的概述 将采集的实际值与给定的目标值进行比较,对产生的偏差用比例、积分和微分进行控制的控制系统,简称PID(Proportional Integral Derivative)控制系统,…
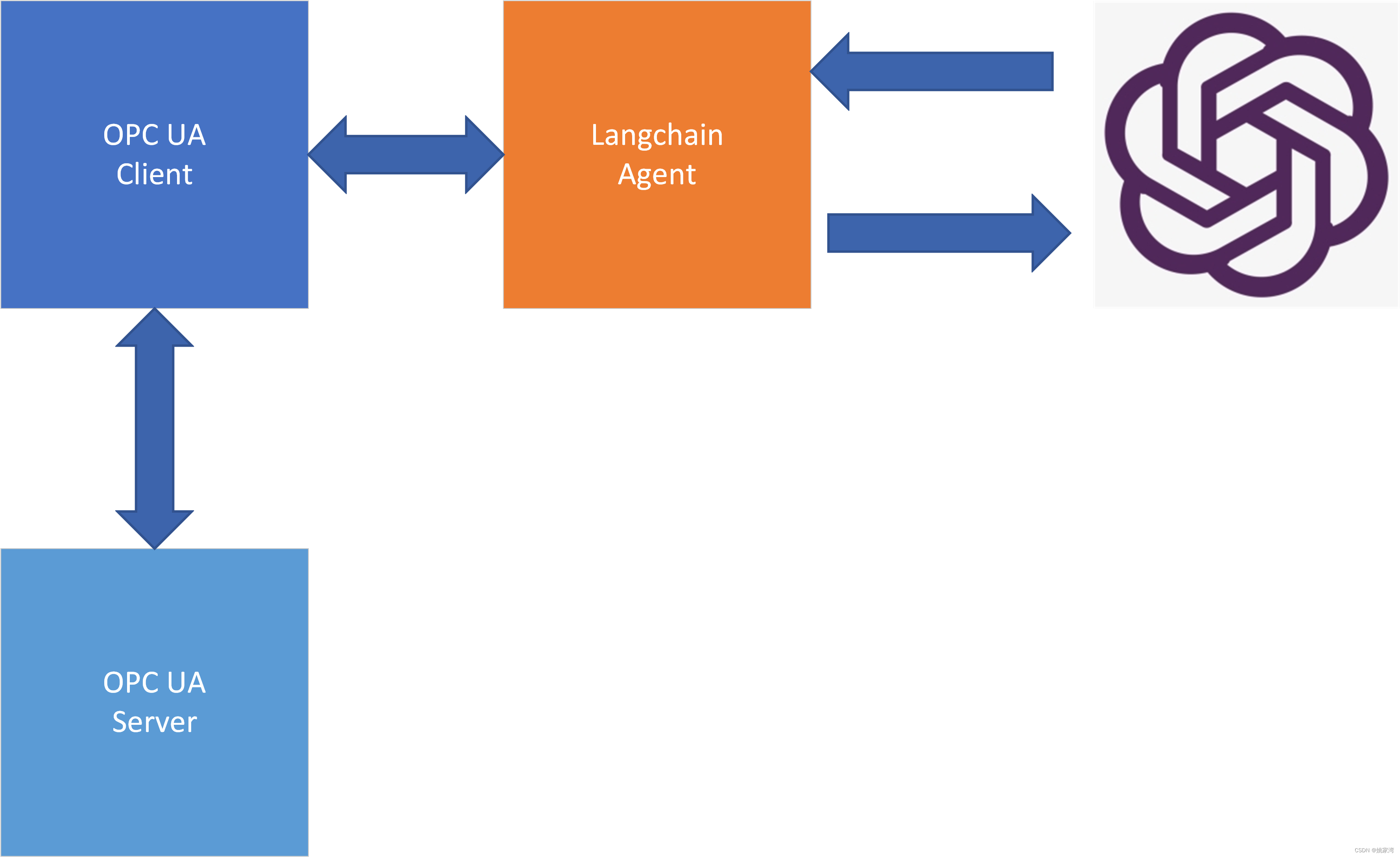
让chatGPT控制物理设备
作为自动控制行业的工程师,我们也许最关心的是如何使chatGPT 控制物理设备。我发现许多人仍然停留在传统程序设计的思维阶段,比如让大模型编写一段PLC 代码,或者是生成一些信息模型。 其实大模型具备判断与思考的能力,AI …
PLC高精度定时器(T法测速功能块)
S7-200 SMART PLC时间间隔指令BGN_ITIME,和CAL_ITIME采用的是系统自带的1ms高精度定时器,PLC里只能调用一次。T法测速和M法测速应用时,都需要高精度时序定时器的支持(当然你也可以采用定时中断的方式获取高精度时序),时间间隔指令请参看下面的博客文章:
SMART PLC时间间…

Chapter8.3:非线性控制系统分析
此系列属于胡寿松《自动控制原理题海与考研指导》(第三版)习题精选,仅包含部分经典习题,需要完整版习题答案请自行查找,本系列属于知识点巩固部分,搭配如下几个系列进行学习,可用于期末考试和考研复习。 自动控制原理(…
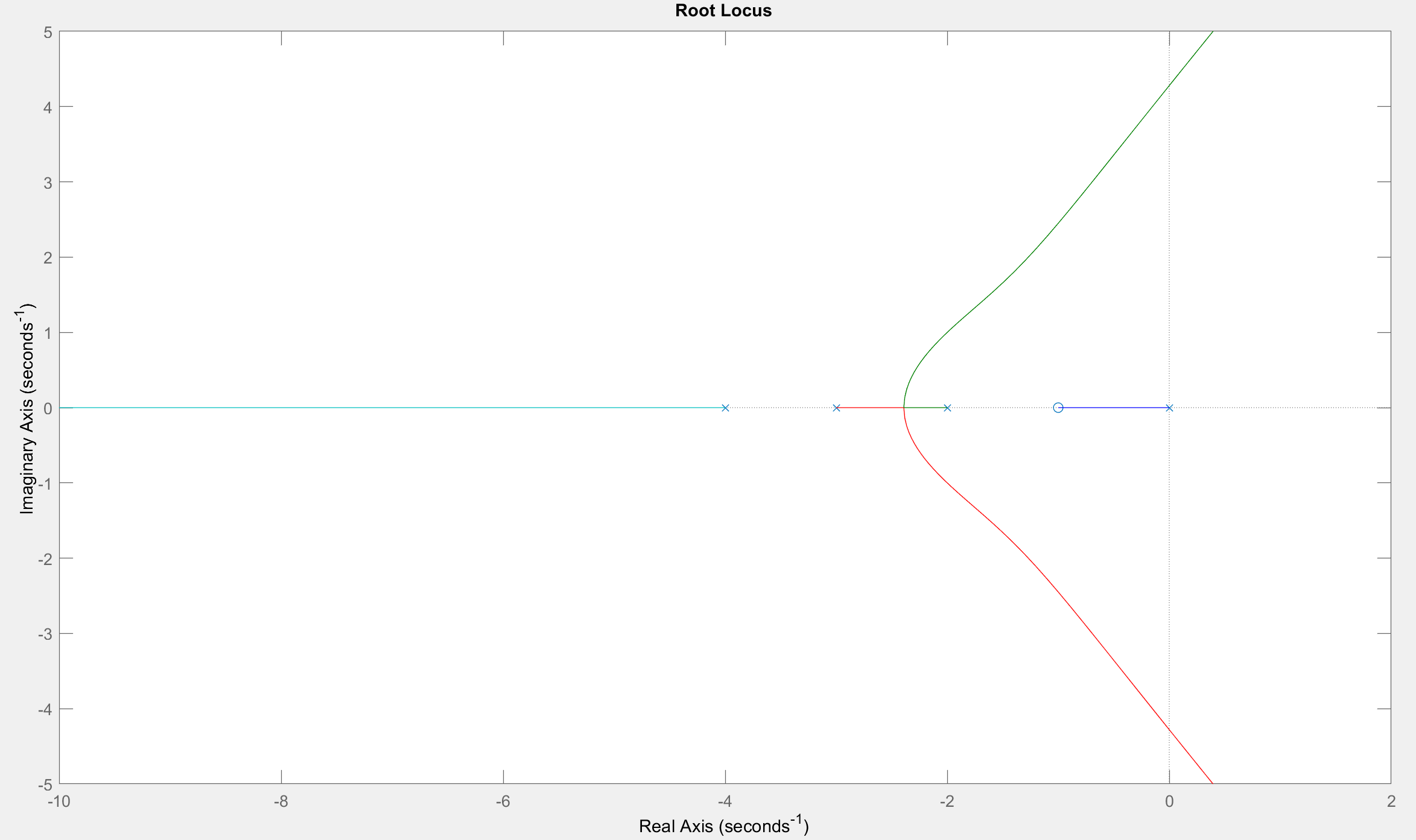
控制理论simulink+matlab
这里写目录标题 根轨迹二级目录三级目录 根轨迹
z [-1]; %开环传递函数的零点
p [0 -2 -3 -4]; %开环传递函数的系统极点
k 1; %开环传递函数的系数,反映在比例上
g zpk(z,p,k); %生成开环传递函数%生成的传递函数如下
% (s1)
% -------------…

Chapter7.4:线性离散系统的分析与校正考研参考题
此系列属于胡寿松《自动控制原理题海与考研指导》(第三版)习题精选,仅包含部分经典习题,需要完整版习题答案请自行查找,本系列属于知识点巩固部分,搭配如下几个系列进行学习,可用于期末考试和考研复习。 自动控制原理(…

控制原理 | PID控制的三个参数如何影响控制效果?(附参数整定方法)
目录 0 专栏介绍1 PID控制基本原理2 比例控制的作用3 积分控制的作用4 微分控制的作用5 参数整定方法5.1 经验法5.2 临界比例度法5.3 衰减曲线法 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规…
CODESYS斜坡函数功能块(ST源代码)
SMART PLC梯形图斜坡函数FC请参看下面文章链接:
SMART PLC斜坡函数功能块(梯形图代码)_RXXW_Dor的博客-CSDN博客斜坡函数Ramp的具体应用可以参看下面的文章链接:PID优化系列之给定值斜坡函数(PLC代码+Simulink仿真测试)_RXXW_Dor的博客-CSDN博客很多变频器里的工艺PID,…
微分方程数值解法(Runge-Kutta法PLC实现)
微分方程数值解法之欧拉法请参看下面的博客文章:
微分方程数值解法(PID仿真用一阶被控对象库PLC算法实现)_数学微积分算法plc编程实例_RXXW_Dor的博客-CSDN博客微分方程除极特殊情况外,大部分不可能求出它的精确解,只能用各种近似方法得到满足一定精度的近似解,微分方程由…
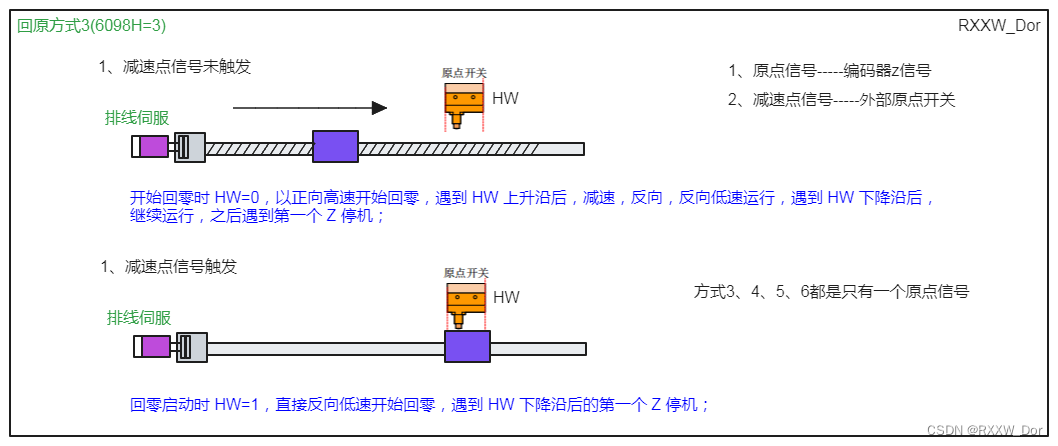
H5U PLC EtherCAT总线伺服回原(6098H=3)
回原方式35请参看下面文章
汇川H5U PLC通过 EtherCAT总线控制伺服回原_RXXW_Dor的博客-CSDN博客大部分运动控制都会对机械回原点进行大篇幅讲解,也可以看出机械回原点的重要性。常规的回原点方式大概有几十种吧,本文会给出常用回原点的注意事项,和编程推荐写法。如果原点回…
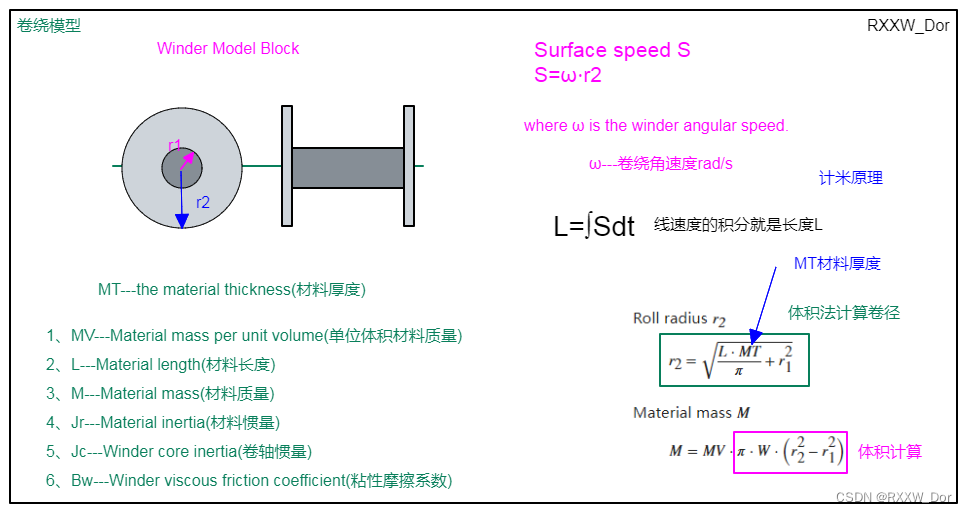
转速/线速度/角速度计算FC
工业应用中很多设备控制离不开转速、线速度的计算,这篇博客给大家汇总整理。张力控制的开环闭环方法中也离不开转速和线速度的计算,详细内容请参看下面的文章链接:
PLC张力控制(开环闭环算法分析)_plc的收卷张力控制系统_RXXW_Dor的博客-CSDN博客里工业控制张力控制无处不…
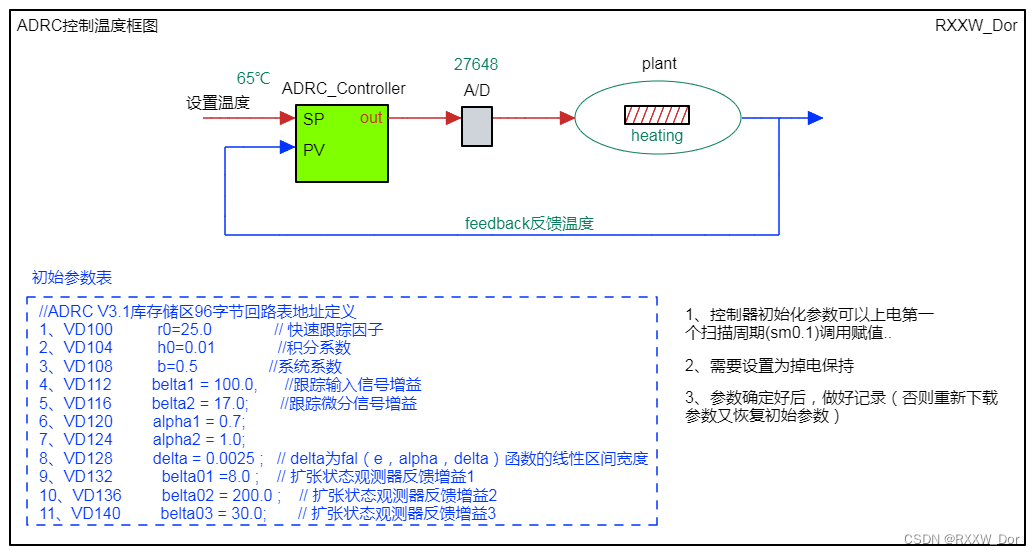
ADRC自抗扰算法优化(PLC梯形图篇)
ADRC自抗扰算法PLC梯形图完整源代码请参看下面博客文章:
ADRC自抗扰控制算法(含梯形图完整源代码和算法公式)_adrc算法_RXXW_Dor的博客-CSDN博客PLC的自抗扰控制(ADRC)算法_RXXW_Dor的博客-CSDN博客_adrc算法1、自抗扰控制算法,网上很多文章有所讲解,大家也可以关注韩京清…

卡尔曼滤波(Kalman Filter)原理浅析-数学理论推导-4
目录 前言数学理论推导1. 直观理解与二维实例2. EKF3. 补充知识-线性化结语参考 前言 最近项目需求涉及到目标跟踪部分,准备从 DeepSORT 多目标跟踪算法入手。DeepSORT 中涉及的内容有点多,以前也就对其进行了简单的了解,但是真正去做发现总是…
闭环控制里的采样周期和执行周期
运动控制对系统的实时性要求都非常高。所以大家可以看到运动控制总线的刷新周期越来越快,越来越短。今天我们讨论下实时性不高的总线会带来哪些问题和挑战,以及这种大延时总线如何解决实时性问题,运动控制实时性问题还可以参看下面的文章博客:
随动控制之跟随给定和跟随反…
博途1200/1500PLC工艺PID编程应用(SCL语言)
博途工艺PID的详细解读可以查看下面的博客文章,这里不再赘述
博途PLC 1200/1500PLC 工艺对象PID PID_Compact详细解读_RXXW_Dor的博客-CSDN博客这篇博文我们详细解读博途PLC自带的PID功能块PID_Compact,大部分工业闭环调节过程,我们采用系统自带的PID功能块基本都能胜任,一…
S型加减速速度给定功能块(SCL+梯形图)
S型加减速详细算法公式请参看下面博客文章,这里不再赘述:
博途PLC1200/1500PLC S型速度曲线变频器控制应用(SCL完整源代码)_RXXW_Dor的博客-CSDN博客PLC运动控制基础系列之梯形速度曲线,可以参看下面这篇博客:PLC运动控制基础系列之梯形速度曲线_RXXW_Dor的博客-CSDN博客运…